Automation Systems
Automation Systems  Motion & Power Solutions
Motion & Power Solutions  Safety, Vision and IDENT
Safety, Vision and IDENT  Sensing Solutions
Sensing Solutions  Control Components
Control Components  Switching & Accessories
Switching & Accessories  Switchgear and Trolley Systems
Switchgear and Trolley Systems  Process Weighing
Process Weighing  LED Lighting
LED Lighting  Omron
Omron
 Mitsubishi
Mitsubishi
 Delta
Delta
 Autonics
Autonics
 Inno
Inno
 Panasonic
Panasonic
 Novotechnik
Novotechnik
 Orientalmotor
Orientalmotor
 Microscan
Microscan
 IPA
IPA
 Technomech
Technomech
 Intech
Intech
 Honeywell
Honeywell
 IOT & Traceability
IOT & Traceability
 Project & Panel Engg.
Project & Panel Engg.
 Application Case Studies
Application Case Studies
 Solutions by Industry
Solutions by Industry
 Solutions by Process
Solutions by Process
 Solutions by Product
Solutions by Product
 Youtube Videos
Youtube Videos
 Corporate Information
Corporate Information
 Company Profile
Company Profile
 Quality Policy
Quality Policy
 Mission Statement
Mission Statement
 Chairman's Message
Chairman's Message
 Intech Group Companies
Intech Group Companies

Compact Industrial SCARA
Compact Industrial Robot with light weight space saving arm. Its high speed operation is best suited for pick and place, labelling, tracking

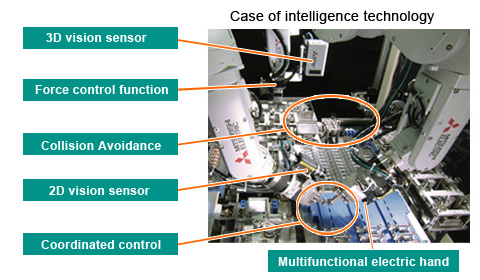
Intelligent Solutions
Optimal acceleration/deceleration control and optimal override control
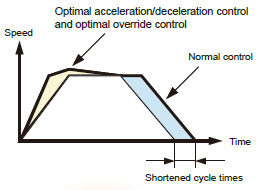
Improved continuous operatability
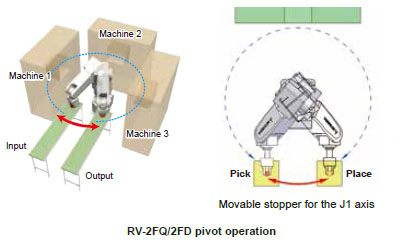
Expanded pivotal operating range
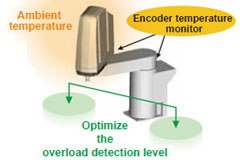
Improved tooling performance